ガントチャート作成、動きを定義する
ガントチャートの作成
-
ガントチャートパネルの
 (追加)ボタンをクリックする
(追加)ボタンをクリックする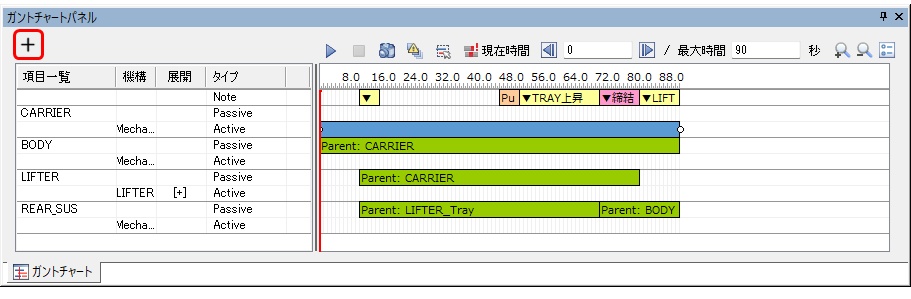
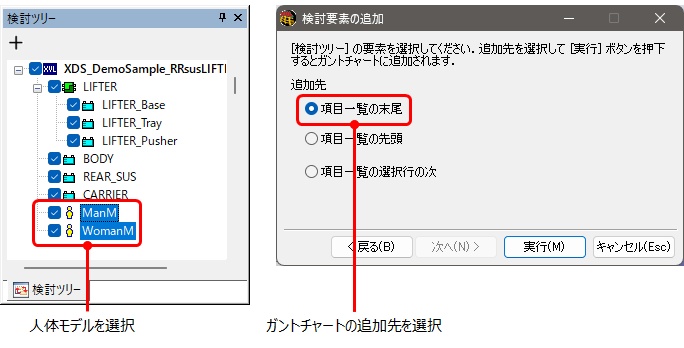
ガントチャートに追加ダイアログが表示されます。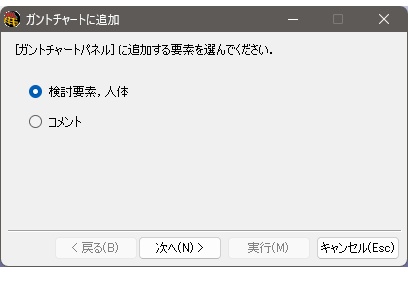
-
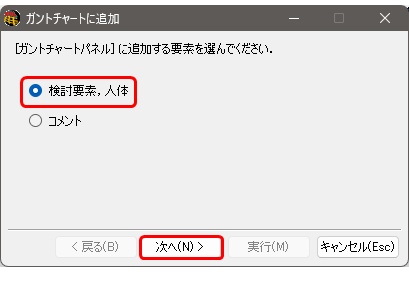
検討要素、人体を選択し、次へボタンをクリックする
-
検討ツリーからガントチャートに追加したい人体モデルを選択し、検討要素の追加ダイアログでガントチャートの追加先を選択する
-
実行、キャンセルボタンをクリックする
ガントチャートに人体モデルが追加されます。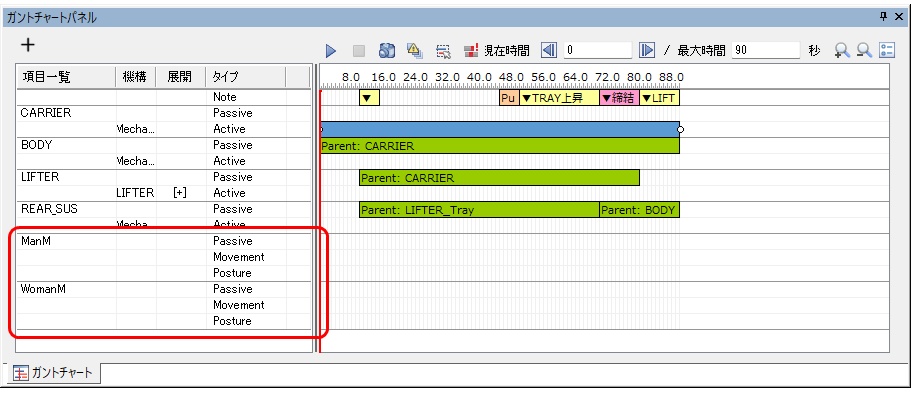
バーの作成:移動(Move)
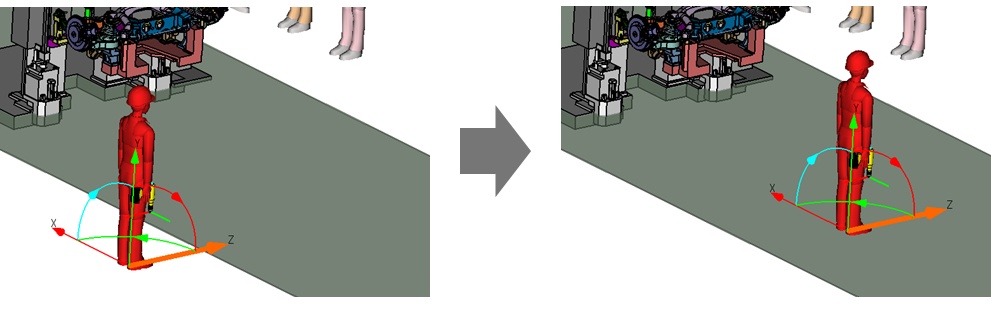
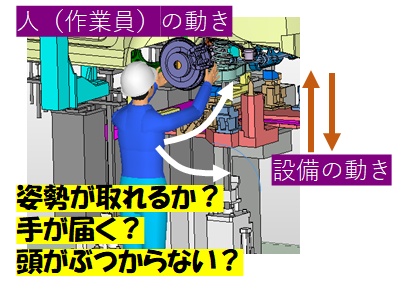
ガントチャート上に下図のような作業員の移動を定義します。
- 人体モデルの Movement 行をドラッグする
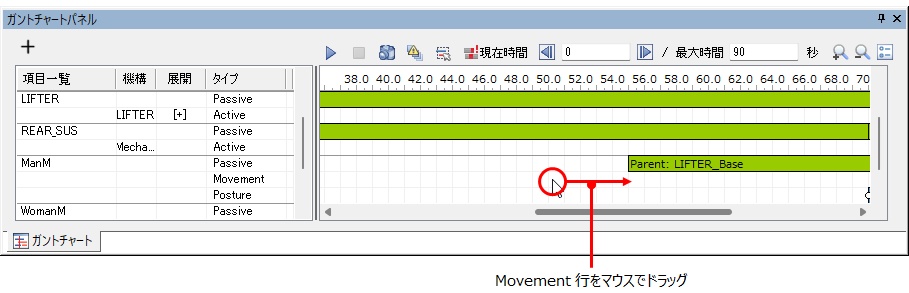 ドラッグした開始時刻からドロップした終了時刻まで、Movement バー(デフォルト:青色)が作成されます。
ドラッグした開始時刻からドロップした終了時刻まで、Movement バー(デフォルト:青色)が作成されます。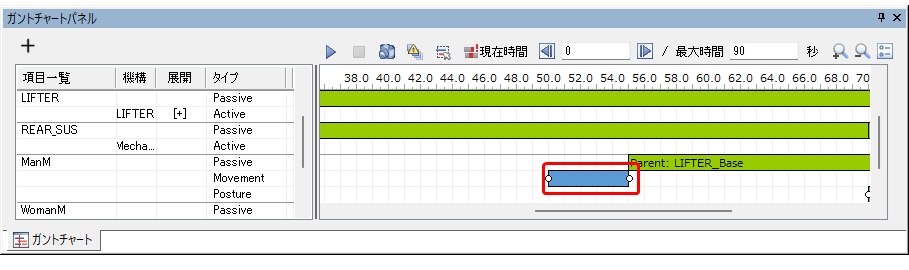
- Movement バーを選択し、右クリックメニューの移動設定を選択する
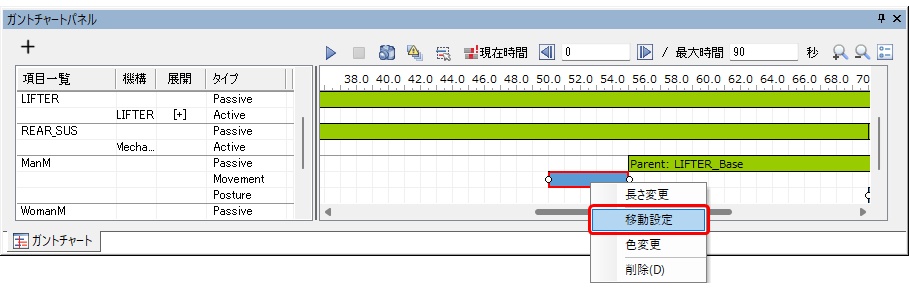 移動設定ダイアログが表示されます。
移動設定ダイアログが表示されます。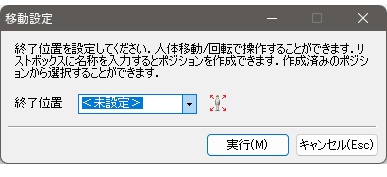
- 移動設定ダイアログの
 (移動)ボタンをクリックする
(移動)ボタンをクリックする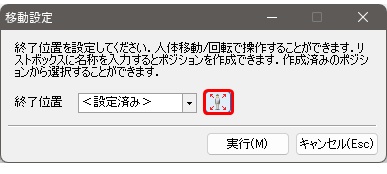 人体移動/回転ダイアログが表示され、人体モデルにマニピュレータが表示されます。
人体移動/回転ダイアログが表示され、人体モデルにマニピュレータが表示されます。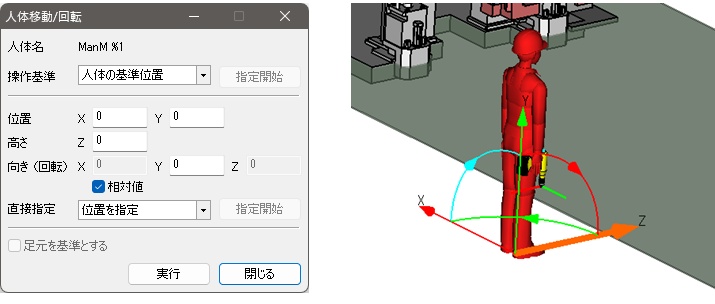
- マニピュレータの軸を移動させ、期待する位置まで人体モデルを移動させる
- 人体移動/回転ダイアログ内の実行、キャンセルボタンをクリックする
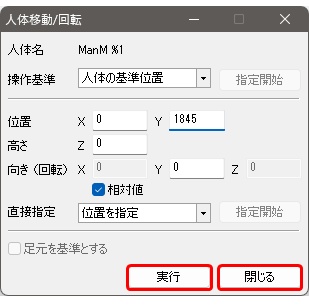
- 終了位置のプルダウンメニューにポジション名称を入力し、実行ボタンをクリックする
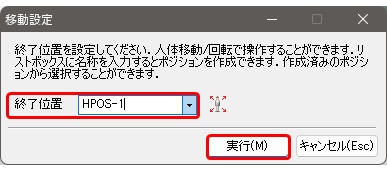 現在の位置がポジションに登録され、終了位置に設定されます。アニメーションを再生すると、終了位置までの移動動作を確認できます。
現在の位置がポジションに登録され、終了位置に設定されます。アニメーションを再生すると、終了位置までの移動動作を確認できます。 ヒント: Movement バーと並行に Posture バーの開始姿勢、終了姿勢に手足姿勢を入れることで疑似歩行アニメーションにすることも可能です。
ヒント: Movement バーと並行に Posture バーの開始姿勢、終了姿勢に手足姿勢を入れることで疑似歩行アニメーションにすることも可能です。
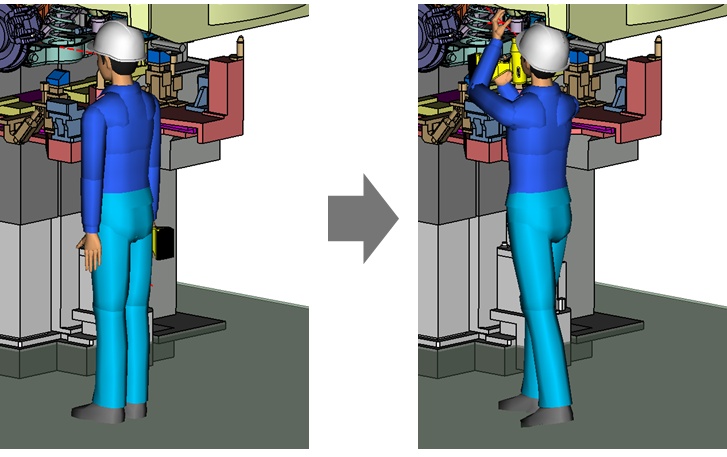
バーの作成:姿勢(Posture)
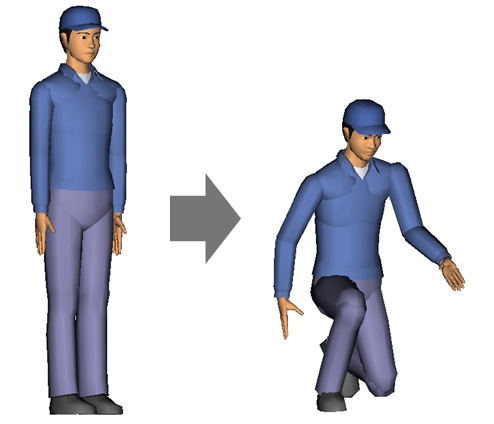
- ガントチャート上に下図のような作業員の姿勢を定義します。
→開始姿勢、終了姿勢を定義することで、作業員の姿勢をアニメーションで確認できます。
- 各作業姿勢を編集したい場合は1関節ごとに変更します。
- 人体モデルの Posture 行をドラッグする
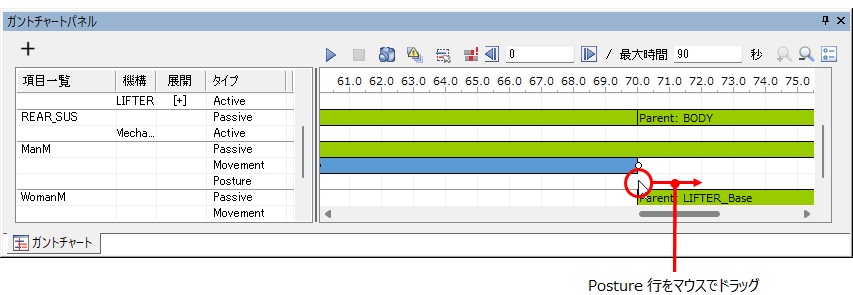 ドラッグした開始時刻からドロップした終了時刻まで、Posture バー(デフォルト:青色)が作成されます。
ドラッグした開始時刻からドロップした終了時刻まで、Posture バー(デフォルト:青色)が作成されます。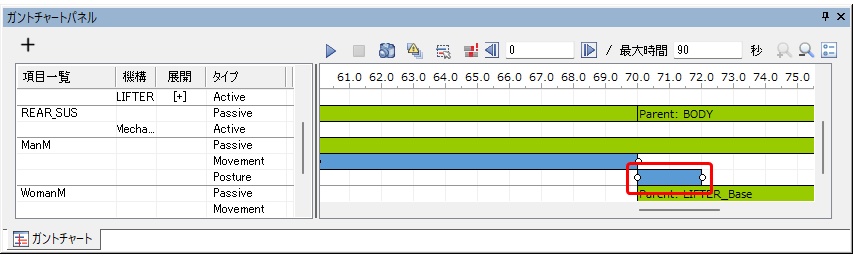
- Posture バーを選択し、右クリックメニューの姿勢設定を選択する
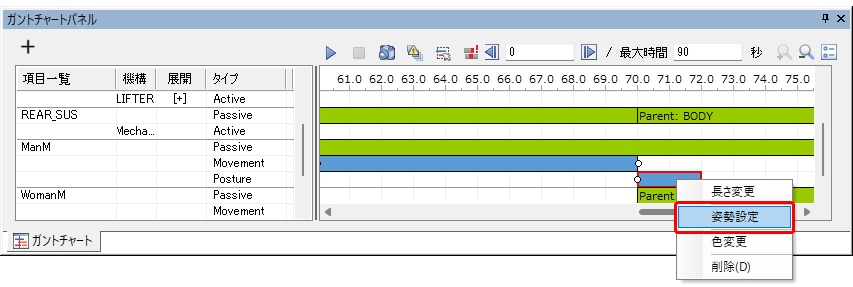 姿勢設定ダイアログが表示されます。
姿勢設定ダイアログが表示されます。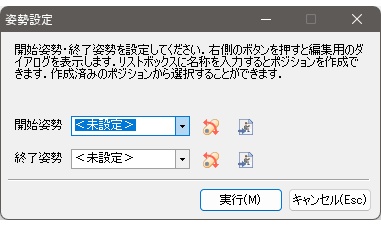
- 姿勢設定ダイアログの
 (1 関節回転)ボタンをクリックする
(1 関節回転)ボタンをクリックする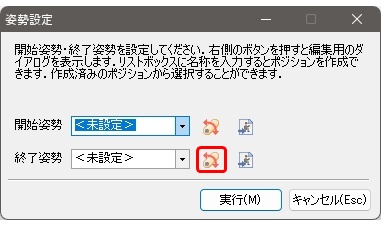 1 関節回転ダイアログが表示されます。
1 関節回転ダイアログが表示されます。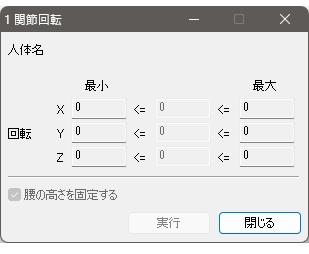
- マニピュレータの軸を移動させ、期待する位置まで人体モデルの関節を移動させる
- 1
関節回転ダイアログ内の実行、閉じるボタンをクリックする
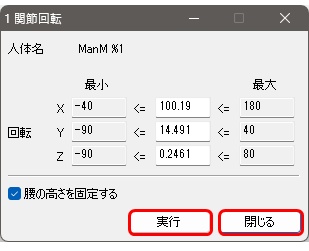
- 終了姿勢のプルダウンメニューにポジション名称を入力し、実行ボタンをクリックする
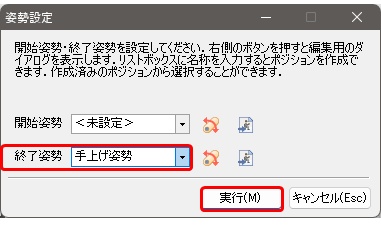 現在の位置がポジションに登録され、終了位置に設定されます。アニメーションを再生すると、終了位置までの移動動作を確認できます。
現在の位置がポジションに登録され、終了位置に設定されます。アニメーションを再生すると、終了位置までの移動動作を確認できます。
ヒント: あらかじめ保存してある姿勢ファイルを呼び出しして 姿勢を定義することもできます。
- 姿勢設定ダイアログの
 (姿勢ファイル)ボタンをクリックする
(姿勢ファイル)ボタンをクリックする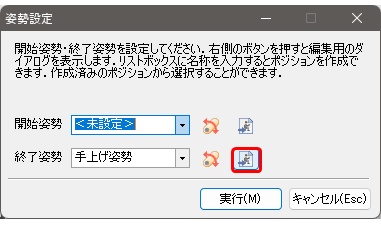
読み込む姿勢ファイルを選択ダイアログが表示されます。
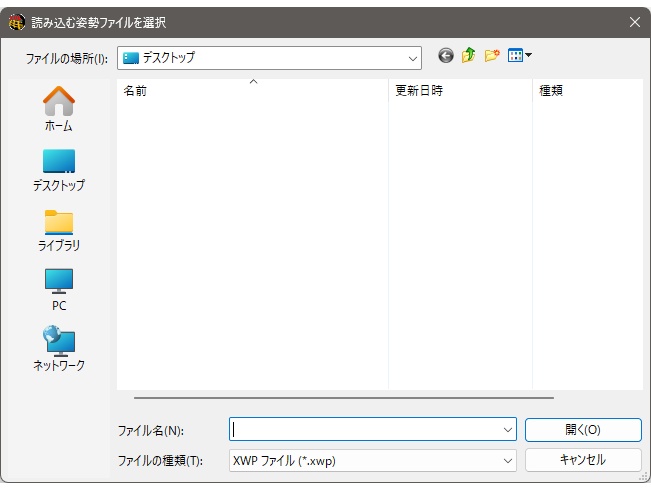
- 姿勢ファイル(*.xwp)を指定して、開くボタンをクリックする
姿勢ファイルの姿勢が適用されませす。姿勢適用後、1関節移動で姿勢を調整できます。
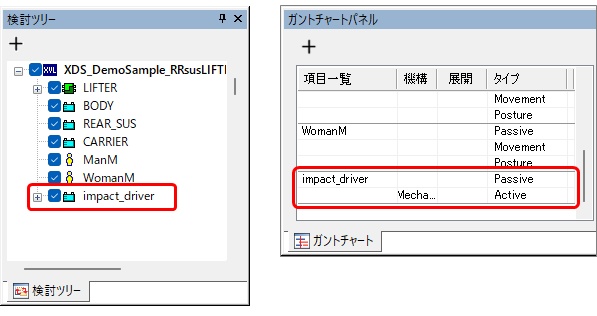
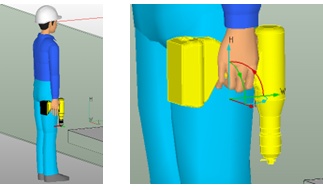
ヒント: 手に工具を関連付けることで、下図のような手の動きに連動して工具を動かすアニメーションも作成可能です。
- 工具を検討ツリーおよびガントチャートに登録する
- 工具の初期位置をパート移動などで人体モデルの初期位置に合わせる
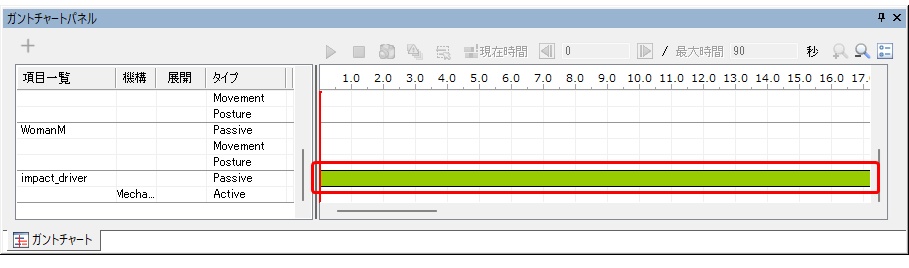
- ガントチャートに工具の Passive バーを作成する
- Passive バーの親に 3D ビューから右手(または左手)を選択する
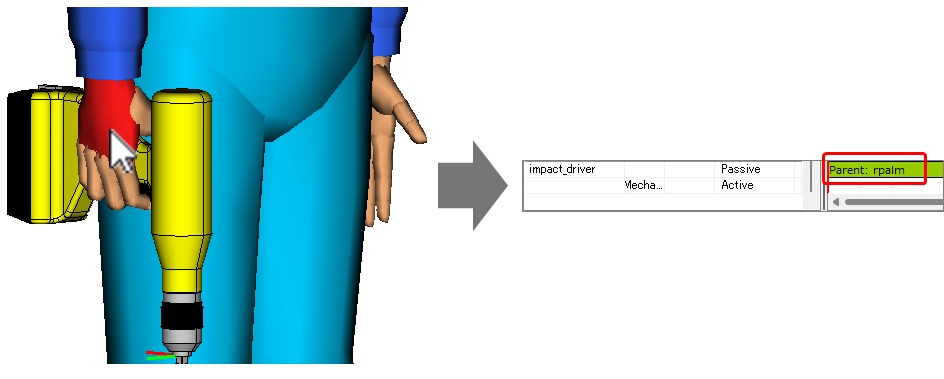 右手の場合は “rpalm”、左手の場合は ”lpalm”
を親に設定してください。手の甲または手のひら部分を選択すると設定できます。
右手の場合は “rpalm”、左手の場合は ”lpalm”
を親に設定してください。手の甲または手のひら部分を選択すると設定できます。
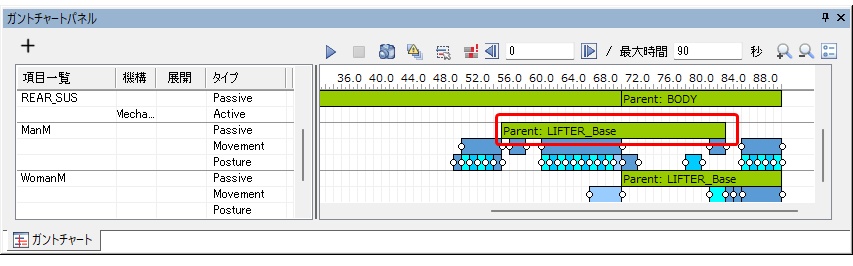
バーの作成:設備の動きに同期する(Passive)
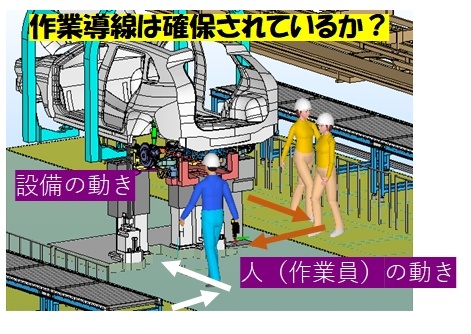
設備の動きに連動して人体モデルの立ち位置を動かします。
コンベアなどの足元が移動する作業場所に立って作業する場合も、人体モデルを Passive 定義することで、立ち位置を移動することができます。
- 人体モデルの Passive 行をドラッグする
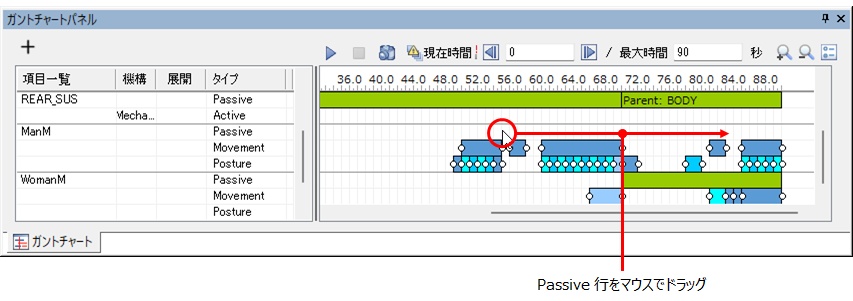 ドラッグした開始時刻からドロップした終了時刻まで Passive バー(デフォルト:緑色)が作成され、Passive 動作設定ダイアログが表示されます。
ドラッグした開始時刻からドロップした終了時刻まで Passive バー(デフォルト:緑色)が作成され、Passive 動作設定ダイアログが表示されます。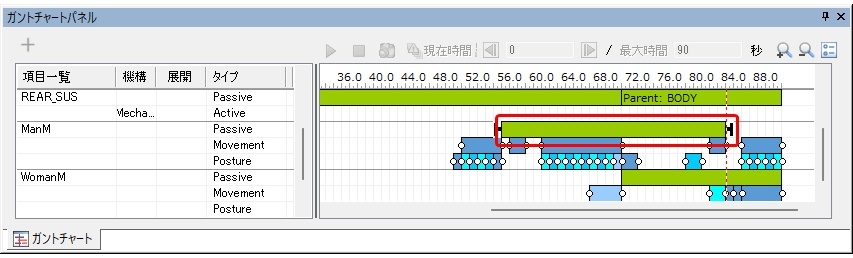
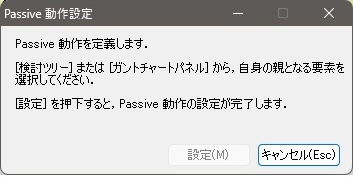
- 検討ツリー、ガントチャート、または 3D ビューから、親にしたい検討要素を選択する
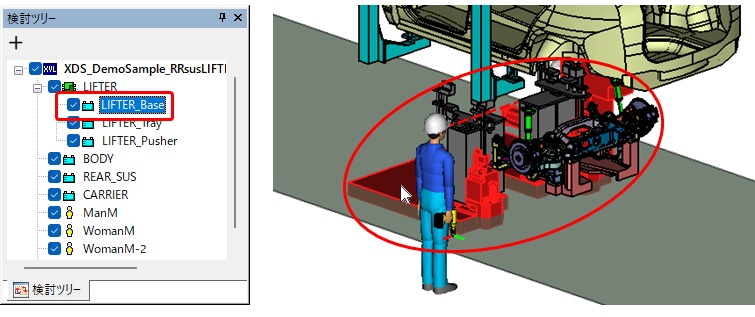
- Passive 動作設定ダイアログの設定ボタンをクリックする
 Passive バーに親が設定されます。指定時間の間、親の動作に追従して動きます。
Passive バーに親が設定されます。指定時間の間、親の動作に追従して動きます。