人体位置の調整手順
インポートした人体データの位置を調整します。
- 利用製品(オプション):XVL Studio Standard 以上 + ヒューマンオプション
- アニメーション編集モードではないことを前提とします。
- 人体が Human_Group としてインポートされていることを前提とします。
-
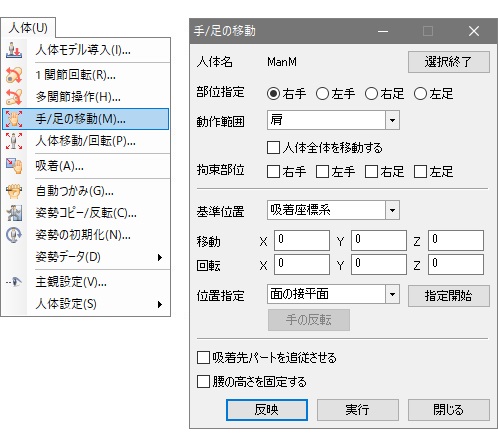
メニューバーから、をクリックし、人体移動 / 回転ダイアログを開く
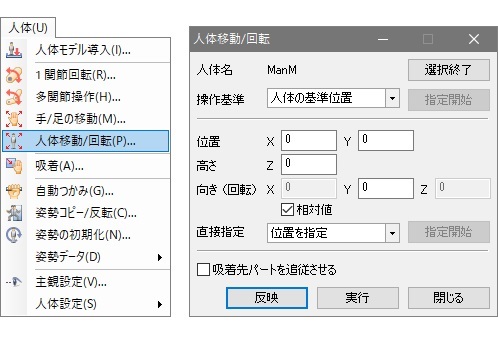
ダイアログ内の人体名について- 人体モデルが一つだけ存在する場合は、既に対象は選択済みの状態となります。
- 人体モデルが複数存在する場合は、移動対象となる人体モデルを選択します。ただし、あらかじめ人体モデルを一つだけ選択した状態でダイアログが開かれた場合は、既に対象は選択済みとみなされます。
-
マニピュレータを利用して、作業位置に移動する
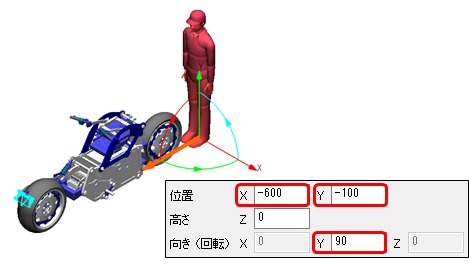
- 実行、閉じるボタンをクリックする
-
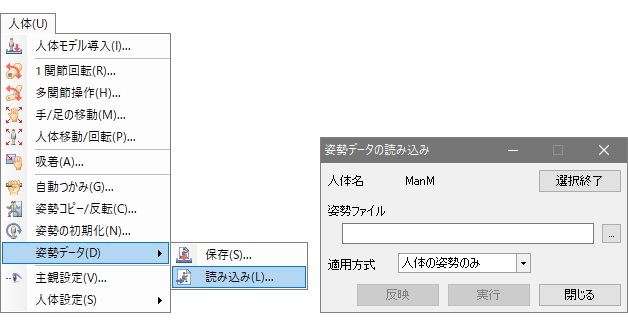
メニューバーから、をクリックし、姿勢データの読み込みダイアログを開く
-
姿勢ファイルの
 をクリックする
をクリックする
-
読み込む姿勢ファイルを選択ダイアログで対象ファイルを選択し、開くボタンをクリックする
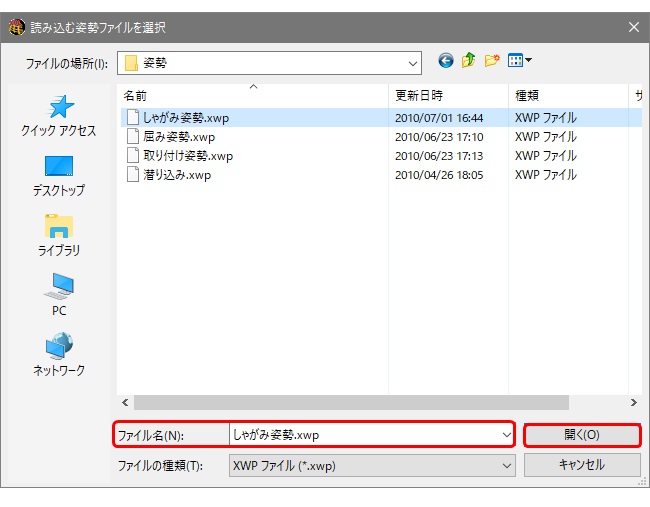
姿勢データの読み込みダイアログに、選択ファイルのパスが入力された状態になります。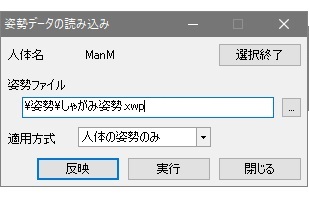
-
姿勢データの読み込みダイアログの実行、閉じるボタンをクリックする
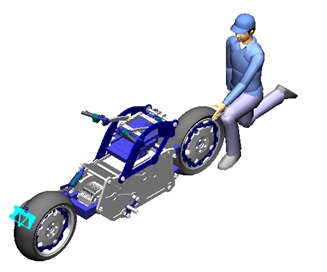
移動先で、人体の姿勢だけが変化します。
-
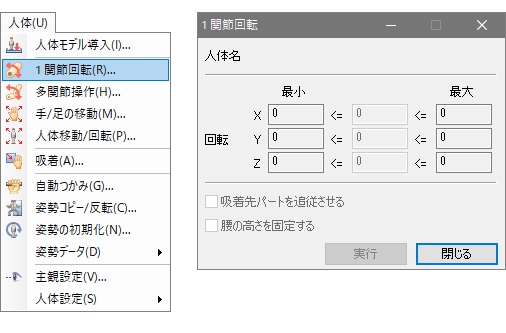
メニューバーから、をクリックし、 1 関節回転ダイアログを開く
-
モデルの左足、腰関節をそれぞれマニピュレータやダイアログ上の数値入力して
左足はタイヤにぶつからないように、腰は作業しやすい程度に曲げ、回転します。
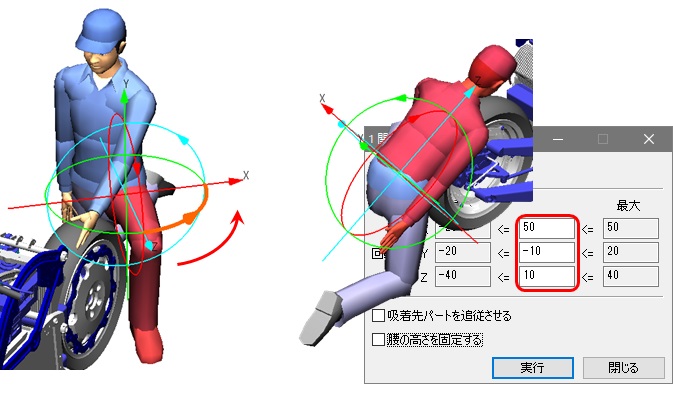
- 実行、閉じるボタンをクリックする
-
メニューバーから、をクリックし、手 / 足の移動ダイアログを開く
-
左手をタイヤに添える
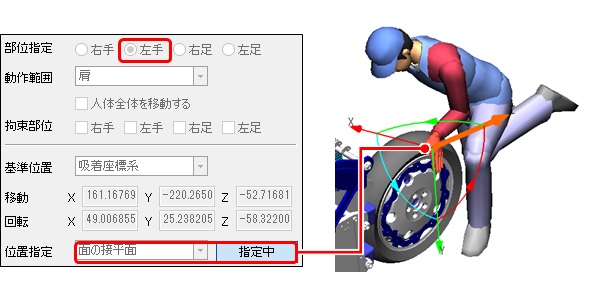
- 実行ボタンをクリックする
-
右手を工具に添える
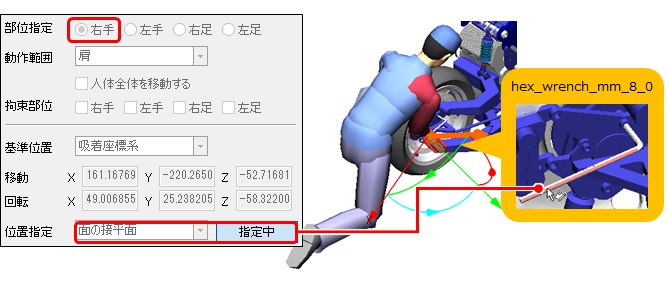
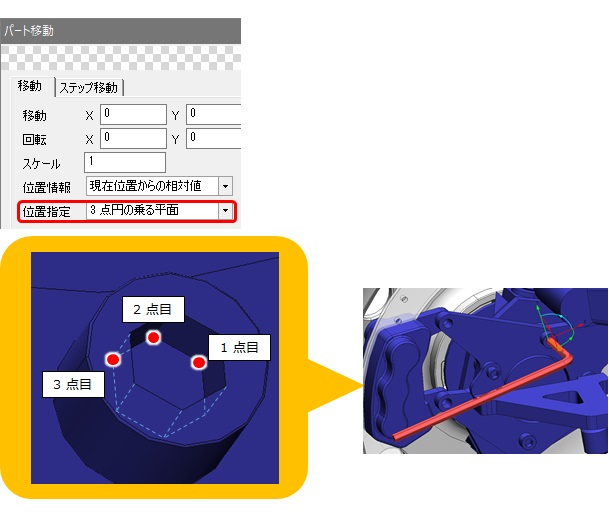
ヒント: 上図の工具は「hex_wrench_mm_8_0」です。読み込み手順は「工具データの読み込み手順」を参照してください。工具読み込み後、設備・工具挿入ダイアログ左下のパート移動ボタンをクリックすれば、位置調整も行えます。- パート移動ダイアログで、基準位置を
3 点円の乗る平面に変更し、ボルトと接触する面上の以下 3 点をクリック選択する
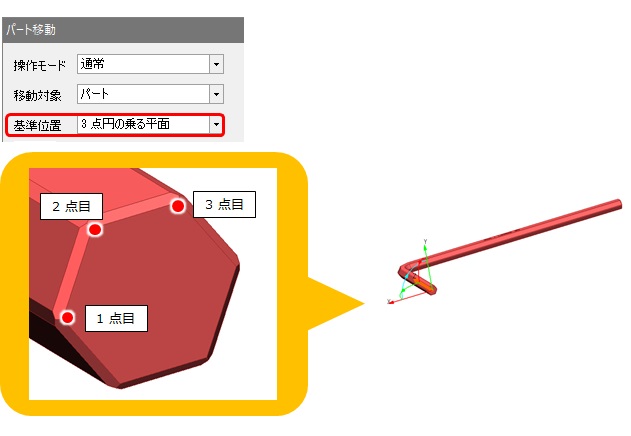
- 位置指定も同様に 3
点円の乗る平面に変更し、工具と接触する面上の以下 3 点をクリック選択する
- パート移動ダイアログで、基準位置を
3 点円の乗る平面に変更し、ボルトと接触する面上の以下 3 点をクリック選択する
- 実行、閉じるボタンをクリックする
-
メニューバーから、をクリックし、自動つかみダイアログを開く
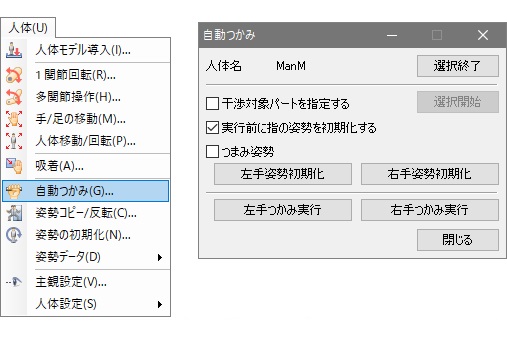
-
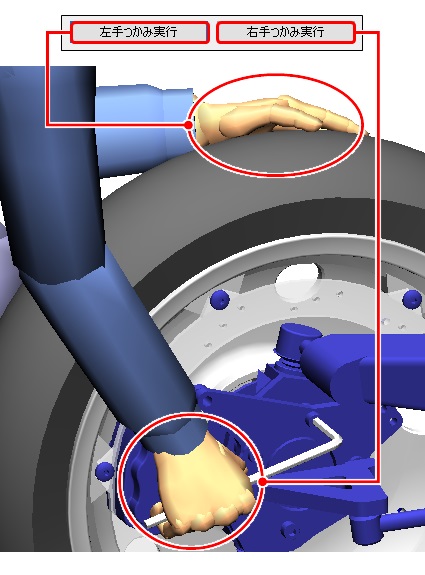
左手つかみ実行、右手つかみ実行をそれぞれクリックする
指が自然に曲がります。
- 閉じるボタンをクリックする